Linux系统定义了I2C驱动体系结构,在Linux内核中的I2C子系统中,I2C驱动共有3部分组成:I2C核心、I2C总线驱动、I2C设备驱动,这三部分组成了I2C的框架;I2C子系统中有4个重要内容:I2C总线、I2C设备、I2C驱动、I2C适配器;
目录 [TOC]
Linux内核中的I2C驱动代码位于:drivers/i2c目录;
0. 简述 Linux内核中的I2C驱动代码位于:drivers/i2c目录;
Linux设备模型由bus、device、driver组成;
I2C驱动中有4个重要内容:I2C总线、I2C设备、I2C驱动、I2C适配器;
I2C总线:维护I2C驱动和I2C设备两个链表,管理I2C驱动和I2C设备的匹配、删除等;
I2C设备:具体硬件设备的一个抽象;
I2C驱动:对应I2C设备的驱动程序;
I2C适配器:用于I2C驱动和I2C设备间通信,是SOC上I2C控制器的一个抽象;
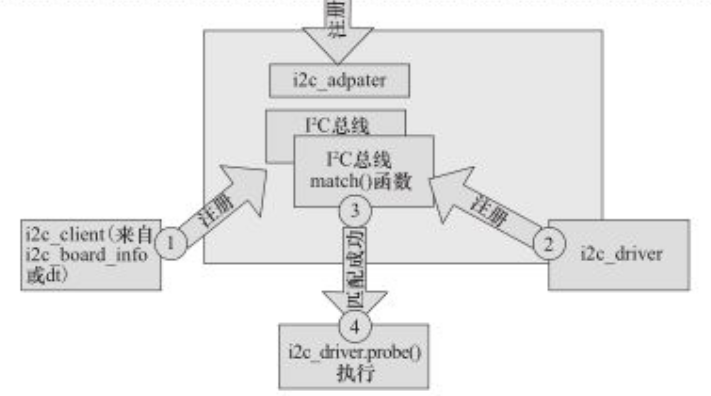
I2C总线上有两个链表,分别是i2c_driver和i2c_client三链表;当任何一个driver或client注册时,I2C总线都会调用match函数,对client.name和driver.id_table.name进行遍历匹配;如果driver.id_table中所有的id都匹配不成功,说明client没有找到对应的driver;如果匹配成功,说明client和driver是配套的,那么I2C总线就会调用自己的probe函数,然后probe函数调用driver中提供的probe函数,driver中的probe函数会对设备进行硬件初始化和后续工作;
i2c_add_adapter // 注册adapter
i2c_add_driver // 注册driver
i2c_new_device // 注册client
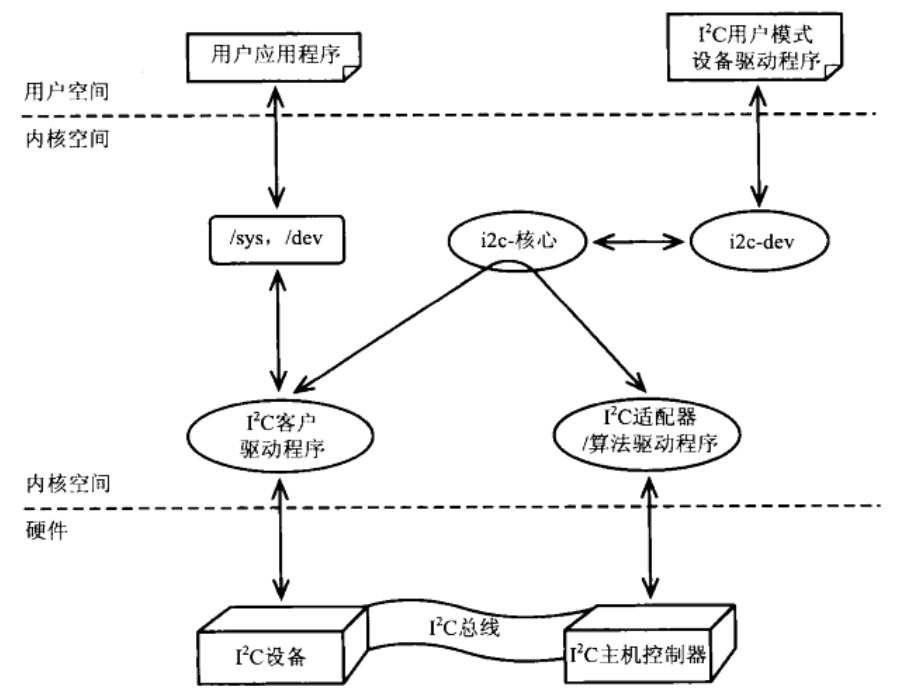
1. I2C驱动框架 Linux的I2C体系结构分为3个部分:
I2C核心
I2C总线驱动
I2C设备驱动
1.1 I2C核心 I2C核心(i2c_core)维护了i2c_bus结构体,提供了:
I2C总线驱动和设备驱动的注册、注销方法
I2C的通信方法(i2c_algorithm)
上层的与具体适配器无关的代码
探测设备、检测设备地址的上层代码
此部分代码由Linux内核提供;
1.2 I2C总线驱动 I2C总线驱动是对I2C硬件体系结构中适配器端的实现,适配器由CPU控制,或者直接集成在CPU内部;
I2C总线驱动主要包含:
I2C适配器数据结构i2c_adapter
I2C适配器的控制算法数据结构i2c_algorithm
控制I2C适配器产生通信信号的函数
通过I2C总线驱动代码,可以控制I2C适配器,以主设备方式产生开始位、停止位、读写周期,以及以从设备方式读写、产生ACK等;
此部分代码由具体的芯片厂商提供,如:高通、Samsung等;
1.3 I2C设备驱动 I2C设备驱动是对I2C硬件体系结构中设备端的实现,设备一般挂接在I2C控制器(适配器)上,通过I2C适配器与CPU交换数据;
I2C设备驱动主要包含i2c_client和i2c_driver结构体,实现和用户交互的文件操作集fops、cdev等;
这两个数据结构中的成员函数,需要由驱动开发者根据具体设备去实现;
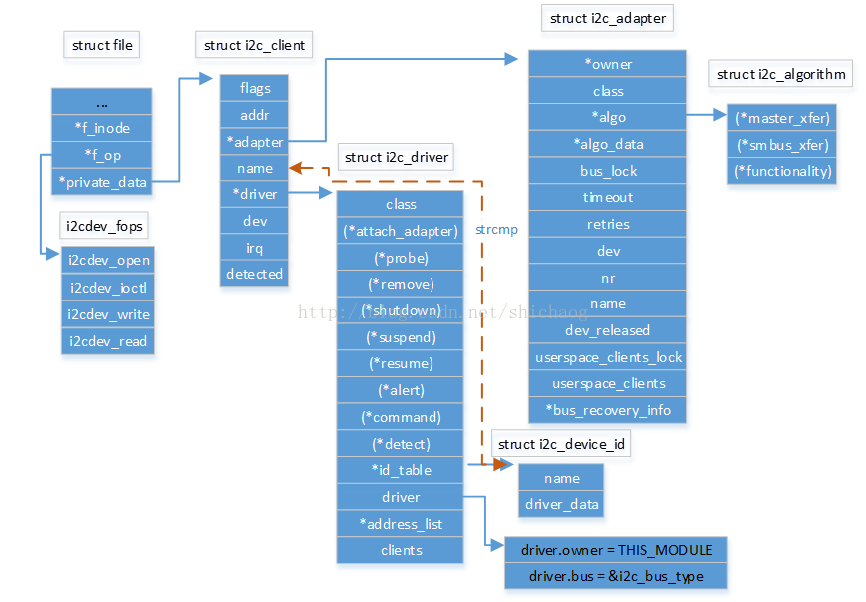
2. 核心数据结构 I2C驱动中最核心的4个数据结构:
struct i2c_client
struct i2c_driver
struct i2c_adapter
struct i2c_algorithm
2.1 设备层 2.1.1 I2C设备(i2c_client) 硬件上连接到I2C的SDA、SCL总线上的设备都是I2C设备,每一个I2C设备由一个i2c_client结构体进行描述;i2c_client对应真实的I2C物理设备,是具体硬件设备的抽象;一个i2c_client对象,表示连接到i2c总线的一个设备;
1 2 3 4 5 6 7 8 9 10 11 12 13 // include/linux/i2c.h struct i2c_client { unsigned short flags; /* div., see below */ unsigned short addr; /* chip address - NOTE: 7bit */ char name[I2C_NAME_SIZE]; struct i2c_adapter *adapter; /* the adapter we sit on */ struct device dev; /* the device structure */ int irq; /* irq issued by device */ struct list_head detected; #if IS_ENABLED(CONFIG_I2C_SLAVE) i2c_slave_cb_t slave_cb; /* callback for slave mode */ #endif };
unsigned short addr:表示7bit的设备芯片地址,地址被保存在低7bits
struct i2c_adapter *adapter:表示这个i2c_client从属的i2c_adapter对象,驱动中使用这个指针操作发送
struct device dev:表示device信息
struct list_head detected:设备链表,将所有的i2c_client组成链表
i2c_client结构不是驱动开发者创建的,而是通过以下方式自动创建:
分配、设置、注册i2c_board_info
获取i2c_adapter,调用i2c_new_device
通过设备树(DeviceTree)创建
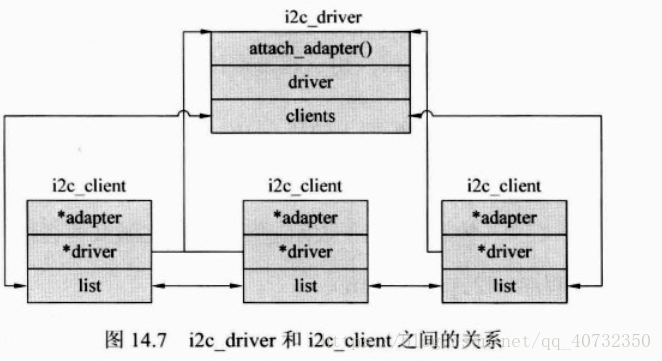
2.1.2 I2C驱动(i2c_driver) i2c_driver结构用于管理I2C的驱动和I2C设备的匹配探测,实现与用户层交互的文件操作集fops、cdev等;每一个I2C设备都对应一个I2C驱动,因此,每一个i2c_client结构,都对应一个i2c_driver结构,通过指针相连;编写一个i2c驱动的本质,就是要构造一个i2c_driver对象,并将其注册到内核;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 // include/linux/i2c.h struct i2c_driver { unsigned int class; int (*attach_adapter)(struct i2c_adapter *) __deprecated; /* Standard driver model interfaces */ int (*probe)(struct i2c_client *, const struct i2c_device_id *); int (*remove)(struct i2c_client *); void (*shutdown)(struct i2c_client *); void (*alert)(struct i2c_client *, enum i2c_alert_protocol protocol, unsigned int data); int (*command)(struct i2c_client *client, unsigned int cmd, void *arg); struct device_driver driver; const struct i2c_device_id *id_table; /* Device detection callback for automatic device creation */ int (*detect)(struct i2c_client *, struct i2c_board_info *); const unsigned short *address_list; struct list_head clients; };
probe:探测函数,匹配成功后执行,会将匹配到的i2c_client对象传入,完成申请资源、初始化、提供接口等操作
remove:移除函数,设备消失时或驱动模块被卸载时会被调用,和probe操作相反
struct device_driver driver:表明是一个设备的驱动类,用于匹配设备树的of_match_table域
const struct i2c_device_id *id_table:用于使用平台文件或模块编写设备信息时进行匹配
struct list_head clients:用于将所有i2c_driver联系到一起的链表
1 #define to_i2c_driver(d) container_of(d, struct i2c_driver, driver)
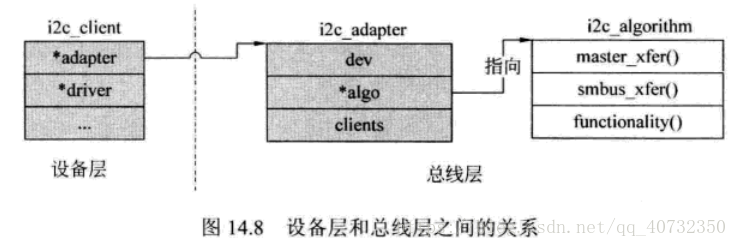
2.1.3 总线和设备关系
2.2 总线层 2.2.1 I2C适配器(i2c_adapter) I2C适配器,即SOC中的I2C控制器,对应struct i2c_adapter结构体;Linux中用i2c_adapter来表示一个I2C控制器,一个i2c_adapter结构体对应的就是SOC上的I2C控制器;所有的设备驱动都需要经过i2c_adapter对象的处理才能和物理设备通信;通过i2c_core层将I2C设备与i2c adapter关联起来,用来完成i2c总线控制器相关的数据通信,此结构体在芯片厂商提供的代码中维护;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 // include/linux/i2c.h struct i2c_adapter { struct module *owner; unsigned int class; /* classes to allow probing for */ const struct i2c_algorithm *algo; /* the algorithm to access the bus */ void *algo_data; /* data fields that are valid for all devices */ const struct i2c_lock_operations *lock_ops; struct rt_mutex bus_lock; struct rt_mutex mux_lock; int timeout; /* in jiffies */ int retries; struct device dev; /* the adapter device */ int nr; char name[48]; struct completion dev_released; struct mutex userspace_clients_lock; struct list_head userspace_clients; struct i2c_bus_recovery_info *bus_recovery_info; const struct i2c_adapter_quirks *quirks; };
1 #define to_i2c_adapter(d) container_of(d, struct i2c_adapter, dev)
2.2.2 I2C总线算法(i2c_algorithm) I2C总线数据通信算法,通过管理I2C总线控制器,实现对I2C总线上数据的发送和接收等操作;
struct i2c_algorithm数据结构,是i2c控制器数据通信需要的控制算法,对应的是I2C的时序;通过管理I2C总线控制器,实现对I2C总线上数据的发送和接收等操作;用来描述适配器和设备之间的通信方法,由芯片厂商实现;
最重要的成员是master_xfer()函数,这个接口是硬件相关的,操作内容都是I2C控制器的寄存器,最终完成将数据发送到物理I2C控制器;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 // include/linux/i2c.h struct i2c_algorithm { int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs, int num); int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr, unsigned short flags, char read_write, u8 command, int size, union i2c_smbus_data *data); /* To determine what the adapter supports */ u32 (*functionality) (struct i2c_adapter *); #if IS_ENABLED(CONFIG_I2C_SLAVE) int (*reg_slave)(struct i2c_client *client); int (*unreg_slave)(struct i2c_client *client); #endif };
master_xfer:最重要的接口,这个接口是硬件相关的,操作内容都是I2C控制器的寄存器,最终完成将数据发送到物理I2C控制器;该函数返回成功发送的消息数,错误返回负数;
device_driver
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 // include/linux/device.h struct device_driver { const char *name; struct bus_type *bus; struct module *owner; const char *mod_name; /* used for built-in modules */ bool suppress_bind_attrs; /* disables bind/unbind via sysfs */ enum probe_type probe_type; const struct of_device_id *of_match_table; const struct acpi_device_id *acpi_match_table; int (*probe) (struct device *dev); int (*remove) (struct device *dev); void (*shutdown) (struct device *dev); int (*suspend) (struct device *dev, pm_message_t state); int (*resume) (struct device *dev); const struct attribute_group **groups; const struct dev_pm_ops *pm; struct driver_private *p; };
2.2.3 I2C总线类型 I2C总线对应着/bus/目录下的一个总线;维护I2C设备和I2C驱动两个链表,管理I2C设备和I2C的匹配和删除;是SOC上I2C控制器的抽象;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 // include/linux/device.h struct bus_type { const char *name; const char *dev_name; struct device *dev_root; struct device_attribute *dev_attrs; /* use dev_groups instead */ const struct attribute_group **bus_groups; const struct attribute_group **dev_groups; const struct attribute_group **drv_groups; int (*match)(struct device *dev, struct device_driver *drv); int (*uevent)(struct device *dev, struct kobj_uevent_env *env); int (*probe)(struct device *dev); int (*remove)(struct device *dev); void (*shutdown)(struct device *dev); int (*online)(struct device *dev); int (*offline)(struct device *dev); int (*suspend)(struct device *dev, pm_message_t state); int (*resume)(struct device *dev); const struct dev_pm_ops *pm; const struct iommu_ops *iommu_ops; struct subsys_private *p; struct lock_class_key lock_key; };
1 2 3 4 5 6 7 8 9 // drivers/i2c/i2c-core.c struct bus_type i2c_bus_type = { .name = "i2c", .match = i2c_device_match, .probe = i2c_device_probe, .remove = i2c_device_remove, .shutdown = i2c_device_shutdown, }; EXPORT_SYMBOL_GPL(i2c_bus_type);
I2C总线bus_type结构体管理着i2c设备和i2c驱动的匹配、删除操作,i2c会调用i2c_device_match函数对比i2c设备和i2c驱动是否匹配,如果匹配就调用i2c_device_probe函数,进而调用i2c驱动的probe函数;
2.3 总线层和设备层关系 在设备层,i2c_client通过adapter指针,指向总线层的i2c_adapter,和总线层存在关系;
在总线层,i2c_adapter通过algo指针,指向i2c_algorithm,进一步调用i2c_algorithm中的算法,如:master_xfer(),进行实际的数据发送和接收;
总线层
struct i2c_adapter I2C适配器(主机CPU的I2C控制器)
struct i2c_algorithm I2C算法(I2C的收、发时序控制)
设备层
struct i2c_client I2C(从机)设备信息
struct i2c_driver I2C(从机)设备驱动信息
2.4 数据结构间的关系
3. 重要的操作函数 3.1 I2C子系统初始化 3.1.1 I2C总线初始化 1 2 3 // drivers/i2c/i2c-core.c postcore_initcall(i2c_init); module_exit(i2c_exit);
1 2 // include/linux/init.h #define postcore_initcall(fn) __define_initcall(fn, 2)
1 2 3 4 // include/linux/init.h #define __define_initcall(fn, id) \ static initcall_t __initcall_##fn##id __used \ __attribute__((__section__(".initcall" #id ".init"))) = fn;
postcore_initcall(i2c_init)操作,会在编译内核时,将函数指针变量__initcall_i2c_init放到名称为initcall2.init的section中;即将i2c_init()函数的首地址放到名称为initcall2.init的section中;
Linux设备启动时,会在do_basic_setup()函数中,通过driver_init()和do_initcalls()函数,调用到i2c_init()函数,对I2C总线初始化;
1 2 3 4 5 6 7 8 9 10 11 // drivers/i2c/i2c-core.c static int __init i2c_init(void) { ...... retval = bus_register(&i2c_bus_type); ...... i2c_adapter_compat_class = class_compat_register("i2c-adapter"); ...... retval = i2c_add_driver(&dummy_driver); ...... }
通过bus_register()函数,在系统中注册一个新的总线i2c_bus_type,name: i2c;适配器设备、I2C设备、I2C设备驱动程序都会连接到这条总线上;
1 2 3 4 5 6 7 8 9 // drivers/i2c/i2c-core.c struct bus_type i2c_bus_type = { .name = "i2c", .match = i2c_device_match, .probe = i2c_device_probe, .remove = i2c_device_remove, .shutdown = i2c_device_shutdown, }; EXPORT_SYMBOL_GPL(i2c_bus_type);
通过i2c_add_driver()函数,向I2C总线注册一个空的I2C设备驱动程序;可以不用关心;
graph TB
i2c_init1(i2c_init)-->bus_register1(bus_register)
subgraph i2c_init
bus_register1(bus_register)-->
class_compat_register(class_compat_register)-->
i2c_add_driver(i2c_add_driver)
end
注册过程中发生异常错误时,需要使用对应的函数进行反向操作:
graph TB
class_compat_register(class_compat_register)
class_compat_unregister(class_compat_unregister)
graph TB
bus_register(bus_register)
bus_unregister(bus_unregister)
3.1.2 I2C总线退出 1 2 3 4 5 6 7 8 9 10 11 12 13 14 // drivers/i2c/i2c-core.c static void __exit i2c_exit(void) { if (IS_ENABLED(CONFIG_ACPI)) WARN_ON(acpi_reconfig_notifier_unregister(&i2c_acpi_notifier)); if (IS_ENABLED(CONFIG_OF_DYNAMIC)) WARN_ON(of_reconfig_notifier_unregister(&i2c_of_notifier)); i2c_del_driver(&dummy_driver); #ifdef CONFIG_I2C_COMPAT class_compat_unregister(i2c_adapter_compat_class); #endif bus_unregister(&i2c_bus_type); tracepoint_synchronize_unregister(); }
i2c_del_driver()函数,用来从I2C总线注销设备驱动程序;和i2c_add_driver()函数功能相反;
graph TB
i2c_add_driver(i2c_add_driver)
i2c_del_driver(i2c_del_driver)
3.2 适配器驱动 适配器驱动程序是I2C设备驱动程序需要实现的主要驱动程序,需要根据具体的适配器硬件编写;
使用内核提供的框架函数向I2C子系统中添加一个新的适配器;i2c_adapter结构体为描述各种I2C适配器提供了通用的封装,但是i2c_adapter结构体只是所有适配器的共有属性,并不能代表所有类型的适配器;
添加新的适配器的过程:
分配一个I2C适配器,并初始化一个i2c_adapter结构体,及相应的变量
使用i2c_add_adapter()函数向I2C子系统添加适配器结构体i2c_adapter
3.2.1 添加适配器驱动 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 int i2c_add_adapter (struct i2c_adapter *adapter) struct device *dev = &adapter ->dev ; int id; if (dev->of_node) { id = of_alias_get_id(dev->of_node, "i2c" ); if (id >= 0 ) { adapter->nr = id; return __i2c_add_numbered_adapter(adapter); } } mutex_lock(&core_lock); id = idr_alloc(&i2c_adapter_idr, adapter, __i2c_first_dynamic_bus_num, 0 , GFP_KERNEL); mutex_unlock(&core_lock); if (WARN(id < 0 , "couldn't get idr" )) return id; adapter->nr = id; return i2c_register_adapter(adapter); } EXPORT_SYMBOL(i2c_add_adapter);
通过i2c_register_adapter()函数,向内核注册一个适配器设备adapter;
graph TB
i2c_add_adapter(i2c_add_adapter)
-->i2c_register_adapter(i2c_register_adapter)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 static int i2c_register_adapter (struct i2c_adapter *adap) int res = -EINVAL; ...... if (WARN(!adap->name[0 ], "i2c adapter has no name" )) goto out_list; if (!adap->algo) { pr_err("adapter '%s': no algo supplied!\n" , adap->name); goto out_list; } if (!adap->lock_ops) adap->lock_ops = &i2c_adapter_lock_ops; ...... if (adap->timeout == 0 ) adap->timeout = HZ; dev_set_name(&adap->dev, "i2c-%d" , adap->nr); adap->dev.bus = &i2c_bus_type; adap->dev.type = &i2c_adapter_type; res = device_register(&adap->dev); pm_runtime_no_callbacks(&adap->dev); pm_suspend_ignore_children(&adap->dev, true ); pm_runtime_enable(&adap->dev); #ifdef CONFIG_I2C_COMPAT res = class_compat_create_link(i2c_adapter_compat_class, &adap->dev, adap->dev.parent); #endif i2c_init_recovery(adap); of_i2c_register_devices(adap); i2c_acpi_register_devices(adap); i2c_acpi_install_space_handler(adap); if (adap->nr < __i2c_first_dynamic_bus_num) i2c_scan_static_board_info(adap); mutex_lock(&core_lock); bus_for_each_drv(&i2c_bus_type, NULL , adap, __process_new_adapter); mutex_unlock(&core_lock); return 0 ; out_list: mutex_lock(&core_lock); idr_remove(&i2c_adapter_idr, adap->nr); mutex_unlock(&core_lock); return res; }
3.2.2 注销适配器驱动 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 void i2c_del_adapter (struct i2c_adapter *adap) struct i2c_adapter *found ; struct i2c_client *client , *next ; mutex_lock(&core_lock); found = idr_find(&i2c_adapter_idr, adap->nr); mutex_unlock(&core_lock); if (found != adap) { pr_debug("attempting to delete unregistered adapter [%s]\n" , adap->name); return ; } i2c_acpi_remove_space_handler(adap); mutex_lock(&core_lock); bus_for_each_drv(&i2c_bus_type, NULL , adap, __process_removed_adapter); mutex_unlock(&core_lock); mutex_lock_nested(&adap->userspace_clients_lock, i2c_adapter_depth(adap)); list_for_each_entry_safe(client, next, &adap->userspace_clients, detected) { list_del(&client->detected); i2c_unregister_device(client); } mutex_unlock(&adap->userspace_clients_lock); device_for_each_child(&adap->dev, NULL , __unregister_client); device_for_each_child(&adap->dev, NULL , __unregister_dummy); #ifdef CONFIG_I2C_COMPAT class_compat_remove_link(i2c_adapter_compat_class, &adap->dev, adap->dev.parent); #endif pm_runtime_disable(&adap->dev); init_completion(&adap->dev_released); device_unregister(&adap->dev); wait_for_completion(&adap->dev_released); mutex_lock(&core_lock); idr_remove(&i2c_adapter_idr, adap->nr); mutex_unlock(&core_lock); memset (&adap->dev, 0 , sizeof (adap->dev)); } EXPORT_SYMBOL(i2c_del_adapter);
3.3 注册I2C驱动 注册I2C驱动需要完成的操作:
将I2C驱动添加到I2C总线的驱动链表中
遍历I2C总线上的I2C设备链表,根据i2c_device_match函数进行匹配,如果匹配就调用i2c_device_probe函数
i2c_device_probe函数会调用I2C驱动的probe函数
3.3.1 注册I2C驱动 在I2C驱动程序中,通过i2c_add_driver()函数,来注册驱动:
1 2 3 // include/linux/i2c.h #define i2c_add_driver(driver) \ i2c_register_driver(THIS_MODULE, driver)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 // drivers/i2c/i2c-core.c int i2c_register_driver(struct module *owner, struct i2c_driver *driver) { ...... /* add the driver to the list of i2c drivers in the driver core */ driver->driver.owner = owner; driver->driver.bus = &i2c_bus_type; // 绑定I2C总线 INIT_LIST_HEAD(&driver->clients); res = driver_register(&driver->driver); // 向I2C总线注册驱动 ...... i2c_for_each_dev(driver, __process_new_driver); return 0; } EXPORT_SYMBOL(i2c_register_driver);
在i2c_add_driver()函数中,做了三件事:
绑定总线
向总线注册驱动 —- 重点
遍历总线的设备,调用__process_new_driver
driver_register
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 // drivers/i2c/i2c-core.c int driver_register(struct device_driver *drv) { int ret; struct device_driver *other; ...... other = driver_find(drv->name, drv->bus); ...... ret = bus_add_driver(drv); ret = driver_add_groups(drv, drv->groups); if (ret) { bus_remove_driver(drv); return ret; } kobject_uevent(&drv->p->kobj, KOBJ_ADD); return ret; } EXPORT_SYMBOL_GPL(driver_register);
driver_find()函数,在I2C总线中,找到name对应的I2C device_driver;
bus_add_driver()函数,将驱动添加到总线上;
graph TB
i2c_add_driver(i2c_add_driver)-->
i2c_register_driver(i2c_register_driver)-->
driver_register(driver_register)-->
bus_add_driver(bus_add_driver)
3.3.2 注销I2C驱动 1 2 3 4 5 6 7 8 9 // drivers/i2c/i2c-core.c void i2c_del_driver(struct i2c_driver *driver) { i2c_for_each_dev(driver, __process_removed_driver); driver_unregister(&driver->driver); pr_debug("driver [%s] unregistered\n", driver->driver.name); } EXPORT_SYMBOL(i2c_del_driver);
3.4 注册I2C设备 3.4.1 注册I2C设备 I2C通过i2c_new_device()函数,来添加一个I2C设备;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 // drivers/i2c/i2c-core.c struct i2c_client * i2c_new_device(struct i2c_adapter *adap, struct i2c_board_info const *info) { struct i2c_client *client; int status; client = kzalloc(sizeof *client, GFP_KERNEL); client->adapter = adap; // 指定设备的适配器 client->dev.platform_data = info->platform_data; if (info->archdata) client->dev.archdata = *info->archdata; client->flags = info->flags; client->addr = info->addr; client->irq = info->irq; strlcpy(client->name, info->type, sizeof(client->name)); status = i2c_check_addr_validity(client->addr, client->flags); /* Check for address business */ status = i2c_check_addr_busy(adap, i2c_encode_flags_to_addr(client)); client->dev.parent = &client->adapter->dev; client->dev.bus = &i2c_bus_type; // 绑定I2C总线 client->dev.type = &i2c_client_type; client->dev.of_node = info->of_node; client->dev.fwnode = info->fwnode; i2c_dev_set_name(adap, client); status = device_register(&client->dev); // 向总线注册设备 ...... return client; } EXPORT_SYMBOL_GPL(i2c_new_device);
1 2 3 4 5 6 7 8 9 10 11 // include/linux/i2c.h struct i2c_board_info { char type[I2C_NAME_SIZE]; // 设备名称,用于与驱动匹配 unsigned short flags; unsigned short addr; // 设备地址 void *platform_data; struct dev_archdata *archdata; struct device_node *of_node; struct fwnode_handle *fwnode; int irq; };
struct i2c_board_info结构体描述了设备的硬件信息;
1 2 3 4 5 6 7 // drivers/base/core.c int device_register(struct device *dev) { device_initialize(dev); return device_add(dev); } EXPORT_SYMBOL_GPL(device_register);
graph TB
i2c_new_device(i2c_new_device)-->
device_register(device_register)-->
device_initialize(device_initialize)
device_register-->device_add(device_add)
device_initialize()函数用来初始化I2C设备的device结构体;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 // drivers/base/core.c void device_initialize(struct device *dev) { dev->kobj.kset = devices_kset; kobject_init(&dev->kobj, &device_ktype); INIT_LIST_HEAD(&dev->dma_pools); mutex_init(&dev->mutex); lockdep_set_novalidate_class(&dev->mutex); spin_lock_init(&dev->devres_lock); INIT_LIST_HEAD(&dev->devres_head); device_pm_init(dev); set_dev_node(dev, -1); #ifdef CONFIG_GENERIC_MSI_IRQ INIT_LIST_HEAD(&dev->msi_list); #endif } EXPORT_SYMBOL_GPL(device_initialize);
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 int device_add(struct device *dev) { struct device *parent = NULL; struct kobject *kobj; struct class_interface *class_intf; int error = -EINVAL; struct kobject *glue_dir = NULL; dev = get_device(dev); if (!dev->p) { error = device_private_init(dev); if (error) goto done; } if (dev->init_name) { dev_set_name(dev, "%s", dev->init_name); dev->init_name = NULL; } if (!dev_name(dev) && dev->bus && dev->bus->dev_name) dev_set_name(dev, "%s%u", dev->bus->dev_name, dev->id); parent = get_device(dev->parent); kobj = get_device_parent(dev, parent); if (kobj) dev->kobj.parent = kobj; if (parent && (dev_to_node(dev) == NUMA_NO_NODE)) set_dev_node(dev, dev_to_node(parent)); error = kobject_add(&dev->kobj, dev->kobj.parent, NULL); if (platform_notify) platform_notify(dev); error = device_create_file(dev, &dev_attr_uevent); error = device_add_class_symlinks(dev); error = device_add_attrs(dev); error = bus_add_device(dev); error = dpm_sysfs_add(dev); device_pm_add(dev); if (MAJOR(dev->devt)) { error = device_create_file(dev, &dev_attr_dev); error = device_create_sys_dev_entry(dev); devtmpfs_create_node(dev); } if (dev->bus) blocking_notifier_call_chain(&dev->bus->p->bus_notifier, BUS_NOTIFY_ADD_DEVICE, dev); kobject_uevent(&dev->kobj, KOBJ_ADD); bus_probe_device(dev); if (parent) klist_add_tail(&dev->p->knode_parent, &parent->p->klist_children); if (dev->class) { mutex_lock(&dev->class->p->mutex); klist_add_tail(&dev->knode_class, &dev->class->p->klist_devices); list_for_each_entry(class_intf, &dev->class->p->interfaces, node) if (class_intf->add_dev) class_intf->add_dev(dev, class_intf); mutex_unlock(&dev->class->p->mutex); } } EXPORT_SYMBOL_GPL(device_add);
device_addbus_add_devicebus_probe_device
3.4.2 注销I2C设备 1 2 3 4 5 6 7 8 9 10 // drivers/i2c/i2c-core.c void i2c_unregister_device(struct i2c_client *client) { if (client->dev.of_node) of_node_clear_flag(client->dev.of_node, OF_POPULATED); if (ACPI_COMPANION(&client->dev)) acpi_device_clear_enumerated(ACPI_COMPANION(&client->dev)); device_unregister(&client->dev); } EXPORT_SYMBOL_GPL(i2c_unregister_device);
graph TB
i2c_new_device(i2c_new_device)
i2c_unregister_device(i2c_unregister_device)
3.5 适配器和设备通信 I2C总线通信方式是对特定的I2C适配器使用i2c_transfer()函数,调用i2c_algothrim的master_xfer()方法实现i2c_msg消息的传输;不同的适配器,对应的master_xfer()方法由控制器的硬件决定,由芯片厂商提供;
3.5.1 i2c_transfer 在I2C设备和I2C驱动匹配之后,驱动程序和设备的通讯,通过i2c_transfer()函数来给设备发送信息;
1 2 3 4 5 6 7 8 9 10 // drivers/i2c/i2c-core.c int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num) { int ret; if (adap->algo->master_xfer) { ...... ret = __i2c_transfer(adap, msgs, num); ...... } EXPORT_SYMBOL(i2c_transfer);
i2c_transfer()函数是i2c核心提供给设备驱动的发送方法,该函数发送的数据需要被打包成i2c_msg结构,该函数最终会回调i2c_adapter->i2c_algorithm->master_xfer()函数,将i2c_msg对象发送到i2c的物理控制器;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 // drivers/i2c/i2c-core.c int __i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num) { unsigned long orig_jiffies; int ret, try; if (adap->quirks && i2c_check_for_quirks(adap, msgs, num)) return -EOPNOTSUPP; if (static_key_false(&i2c_trace_msg)) { int i; for (i = 0; i < num; i++) if (msgs[i].flags & I2C_M_RD) trace_i2c_read(adap, &msgs[i], i); else trace_i2c_write(adap, &msgs[i], i); } orig_jiffies = jiffies; for (ret = 0, try = 0; try <= adap->retries; try++) { ret = adap->algo->master_xfer(adap, msgs, num); // 发送、接收信息操作 if (ret != -EAGAIN) break; if (time_after(jiffies, orig_jiffies + adap->timeout)) break; } ...... } EXPORT_SYMBOL(__i2c_transfer);
最终,通过adap->algo->master_xfer()函数,将struct i2c_msg结构体类型的消息,通过适配器的struct i2c_adapter发送给设备,或者从设备中读取信息;
3.5.2 消息格式 经过mster_xfer()函数发送、接收的消息类型应该按照struct i2c_msg结构体格式:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 struct i2c_msg { __u16 addr; __u16 flags; #define I2C_M_RD 0x0001 #define I2C_M_TEN 0x0010 #define I2C_M_RECV_LEN 0x0400 #define I2C_M_NO_RD_ACK 0x0800 #define I2C_M_IGNORE_NAK 0x1000 #define I2C_M_REV_DIR_ADDR 0x2000 #define I2C_M_NOSTART 0x4000 #define I2C_M_STOP 0x8000 __u16 len; __u8 *buf; };
I2C传输数据是以字节为单位的,具体到i2c_msg结构体,buf表示要传输的数据,len表示传输的数据字节数;
I2C读取,即封装的xxx_i2c_read()函数,需要两个i2c_msg组成的数组;第一个i2c_msg的buf,保存master向slave发出目标寄存器地址,len表示寄存器地址字节长度;第二个i2c_msg的buf,用来接收slave向master返回的数据,len表示期望读到的数据字节长度;
I2C写入,即封装的xxx_i2c_write()函数,仅由一个i2c_msg组成;i2c_msg的buf,保存从slave的目标寄存器地址和要写入的数据,len表示期望写入的数据字节长度;
注意:以数组格式定义i2c_msg是为了访问连续,因为数组是连续内存存储的;
3.5.3 消息发送、接收函数 1)发送函数 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 // drivers/i2c/i2c-core.c int i2c_master_send(const struct i2c_client *client, const char *buf, int count) { int ret; struct i2c_adapter *adap = client->adapter; struct i2c_msg msg; msg.addr = client->addr; msg.flags = client->flags & I2C_M_TEN; msg.len = count; msg.buf = (char *)buf; ret = i2c_transfer(adap, &msg, 1); return (ret == 1) ? count : ret; } EXPORT_SYMBOL(i2c_master_send);
I2C发送消息操作时,仅需要一个i2c_msg;i2c_msg的buf,保存slave的目标寄存器地址和要写入的数据,len表示期望写入的数据字节长度;如下:
1 i2c_master_send(client, data, len);
2)接收函数 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 // drivers/i2c/i2c-core.c int i2c_master_recv(const struct i2c_client *client, char *buf, int count) { struct i2c_adapter *adap = client->adapter; struct i2c_msg msg; int ret; msg.addr = client->addr; msg.flags = client->flags & I2C_M_TEN; msg.flags |= I2C_M_RD; msg.len = count; msg.buf = buf; ret = i2c_transfer(adap, &msg, 1); return (ret == 1) ? count : ret; } EXPORT_SYMBOL(i2c_master_recv);
I2C接收消息操作时,需要给从设备发送两个i2c_msg组成的数组;第一个i2c_msg的buf,保存master向slave发出目标寄存器地址,并使用buf指针指向这个地址,len表示寄存器地址字节长度;第二个i2c_msg的buf,用来接收slave向master返回的数据,len表示期望读到的数据字节长度;
也可以分两次,先使用i2c_master_send()函数,向slave发出目标寄存器地址,在使用i2c_master_recv()函数,用来接收读取到的数据消息;如下:
1 2 i2c_master_send(client, reg, 2 ); i2c_master_recv(client, data, len);
4. 添加设备 在内核中的Documentation/i2c/instantiating-devices文件中,讲述了添加设备的方法;
i2c_client结构是通过以下方式自动创建:
分配、设置、注册i2c_board_info
获取i2c_adapter,调用i2c_new_device
通过设备树(DeviceTree)创建
4.1 添加设备树 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 // Image-fsl-lx2160a-rdb-new.dts i2c@2030000 { compatible = "fsl,vf610-i2c"; #address-cells = <0x1>; #size-cells = <0x0>; reg = <0x0 0x2030000 0x0 0x10000>; interrupts = <0x0 0x23 0x4>; scl-gpios=<&gpio4 8 0x0>; clock-names = "i2c"; clocks = <0x2 0x4 0x7>; status = "okay"; rtc@32 { compatible = "Micro Crystal,rv8803"; reg = <0x32>; }; eeprom_mcy@51 { compatible = "mcy,eeprom_mcy"; reg = <0x51>; }; };
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 # ls /sys/bus/i2c/devices/ 2-0032 2-0051 i2c-0 i2c-1 i2c-2 i2c-3 # ls /sys/bus/i2c/devices/ -l total 0 lrwxrwxrwx 1 root root 0 Oct 15 03:26 2-0032 -> ../../../devices/platform/soc/2030000.i2c/i2c-2/2-0032 lrwxrwxrwx 1 root root 0 Oct 15 03:26 2-0051 -> ../../../devices/platform/soc/2030000.i2c/i2c-2/2-0051 lrwxrwxrwx 1 root root 0 Oct 15 03:26 i2c-0 -> ../../../devices/platform/soc/2000000.i2c/i2c-0 lrwxrwxrwx 1 root root 0 Oct 15 03:26 i2c-1 -> ../../../devices/platform/soc/2010000.i2c/i2c-1 lrwxrwxrwx 1 root root 0 Oct 15 03:26 i2c-2 -> ../../../devices/platform/soc/2030000.i2c/i2c-2 lrwxrwxrwx 1 root root 0 Oct 15 03:26 i2c-3 -> ../../../devices/platform/soc/2050000.i2c/i2c-3 # ls /sys/bus/i2c/devices/2-0051/ consumers modalias name of_node subsystem suppliers uevent # ls /sys/bus/i2c/devices/2-0051/ -l total 0 -r--r--r-- 1 root root 4096 Oct 15 03:27 consumers -r--r--r-- 1 root root 4096 Oct 15 03:27 modalias -r--r--r-- 1 root root 4096 Oct 15 03:27 name lrwxrwxrwx 1 root root 0 Oct 15 03:27 of_node -> ../../../../../../firmware/devicetree/base/soc/i2c@2030000/eeprom_mcy@51 lrwxrwxrwx 1 root root 0 Oct 15 03:27 subsystem -> ../../../../../../bus/i2c -r--r--r-- 1 root root 4096 Oct 15 03:27 suppliers -rw-r--r-- 1 root root 4096 Oct 15 03:27 uevent # cat /sys/bus/i2c/devices/2-0051/name eeprom_mcy
4.2 i2c_new_device添加 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 #include <linux/module.h> #include <linux/i2c.h> static struct i2c_client *client ;static struct i2c_board_info eeprom_info = { I2C_BOARD_INFO("eeprom_device" , 0x51 ), }; static int eeprom_device_init (void ) struct i2c_adapter *adap = NULL ; printk("%s: %d\n" , __func__, __LINE__); adap = i2c_get_adapter(2 ); if (!adap) { printk("%s, i2c_get_adapter failed!\n" , __func__); return -1 ; } client = i2c_new_device(adap, &eeprom_info); if (!client) { printk("%s, i2c_new_device failed!\n" , __func__); return -2 ; } i2c_put_adapter(adap); return 0 ; } static void eeprom_device_exit (void ) printk("%s: %d\n" , __func__, __LINE__); i2c_unregister_device(client); } module_init(eeprom_device_init); module_exit(eeprom_device_exit);
4.3 静态注册I2C设备 内核提供了一种静态注册I2C设备的方法,通过i2c_register_board_info()函数实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 // drivers/i2c/i2c-boardinfo.c int i2c_register_board_info(int busnum, struct i2c_board_info const *info, unsigned len) { int status; if (busnum >= __i2c_first_dynamic_bus_num) __i2c_first_dynamic_bus_num = busnum + 1; for (status = 0; len; len--, info++) { struct i2c_devinfo *devinfo; devinfo = kzalloc(sizeof(*devinfo), GFP_KERNEL); devinfo->busnum = busnum; devinfo->board_info = *info; list_add_tail(&devinfo->list, &__i2c_board_list); } ...... }
在系统初始化过程中,可以通过i2c_register_board_info()函数,将需要的I2C设备添加到__i2c_board_list链表;系统在成功加载I2C适配器adapter后,会对这个__i2c_board_list链表中所有的设备逐一完成i2c_client的注册;
1 2 3 4 5 6 // drivers/i2c/i2c-core.h struct i2c_devinfo { struct list_head list; int busnum; struct i2c_board_info board_info; };
系统初始化时,根据I2C设备配置信息,创建I2C设备(i2c_client),并添加到I2C子系统;
最终是在i2c_scan_static_board_info()函数中,通过调用i2c_new_device()函数来实现添加设备;i2c_scan_static_board_info()函数一般在初始化时工作;
1 2 3 4 5 6 7 8 9 10 11 12 // drivers/i2c/i2c-core.c static void i2c_scan_static_board_info(struct i2c_adapter *adapter) { struct i2c_devinfo *devinfo; list_for_each_entry(devinfo, &__i2c_board_list, list) { if (devinfo->busnum == adapter->nr && !i2c_new_device(adapter, &devinfo->board_info)) ...... } }
5. 添加驱动 以eeprom为例;
5.1 I2C设备驱动框架 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 static int mcy_eeprom_init (void ) printk("%s\n" , __func__); i2c_add_driver(&mcy_eeprom_driver); return 0 ; } static void mcy_eeprom_exit (void ) printk("%s\n" , __func__); i2c_del_driver(&mcy_eeprom_driver); } module_init(mcy_eeprom_init); module_exit(mcy_eeprom_exit);
1 2 3 4 5 6 7 8 9 10 struct i2c_driver mcy_eeprom_driver = { .driver = { .owner = THIS_MODULE, .name = "mcy_eeprom" , }, .probe = mcy_eeprom_probe, .remove = mcy_eeprom_remove, .id_table = mcy_eeprom_id, };
graph TB
eeprom_init(eeprom_init)-->
i2c_add_driver(i2c_add_driver)-->eeprom_driver(eeprom_driver)
eeprom_driver-->driver(driver)
eeprom_driver-->probe(probe)
eeprom_driver-->remove(remove)
eeprom_driver-->id_table(id_table)
5.2 probe函数 1)注册字符设备 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 int mcy_eeprom_probe (struct i2c_client *client, const struct i2c_device_id *id) int ret = -1 ; printk("%s\n" , __func__); eeprom_driver.client = client; ret = alloc_chrdev_region(&devnum, 0 , 1 , "mcy_eeprom_chrdev" ); if (ret) { printk("%s, alloc_chrdev_region failed!\n" , __func__); goto chrdev_err; } printk("%s, alloc_chrdev_region, devnum: %d\n" , __func__, devnum); cdev = cdev_alloc(); cdev_init(cdev, &mcy_eeprom_fops); ret = cdev_add(cdev, devnum, 1 ); if (ret) { printk("%s, cdev_add failed!\n" , __func__); goto cdev_err; } dev_class = class_create(THIS_MODULE, "mcy_eeprom_class" ); if (IS_ERR(dev_class)) { printk("%s, dev_class class_create failed\n" , __func__); goto class_err; } device_create(dev_class, NULL , devnum, NULL , "mcy_eeprom0" ); printk("%s, OK!\n" , __func__); return 0 ; class_err: cdev_del(cdev); cdev_err: unregister_chrdev_region(devnum, 1 ); chrdev_err: return -1 ; }
2)卸载函数 1 2 3 4 5 6 7 8 9 10 11 12 int mcy_eeprom_remove (struct i2c_client *client) printk("%s\n" , __func__); device_destroy(dev_class, devnum); class_destroy(dev_class); cdev_del(cdev); unregister_chrdev_region(devnum, 1 ); kfree(cdev); return 0 ; }
3)字符设备操作集 1 2 3 4 5 6 struct file_operations mcy_eeprom_fops = { .open = eeprom_driver_open, .release = eeprom_driver_release, .read = eeprom_driver_read, .write = eeprom_driver_write, };
5.3 读写函数 I2C数据的发送和接收,是通过I2C驱动中file_operations的write和read系统调用来实现的;驱动中read和write的封装,是需要封装调用i2c_transfer()函数来完成i2d_msg消息的通信;read和write函数的封装,有两种方法;
5.3.1 内核函数调用 使用i2c-core.c提供的i2c_master_send()和i2c_master_recv()函数实现I2C信息的发送和接收;
1)发送 1 i2c_master_send(client, data, len);
I2C发送,直接调用i2c_master_send()函数,一次完成I2C数据的发送;
data:要发送的数据信息数组;其中data最前边的地址存放的是I2C从设备寄存器的地址,如果地址是8bits,就占用data[0],如果地址是16bits,占用data[0]和data[1];在地址之后,紧接着存放要发送的数据内容;
len:要发送的数据长度;包含I2C从设备寄存器地址和数据内容的总数据长度;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 static ssize_t eeprom_driver_write (struct file *filp, const char __user *buf, size_t count, loff_t *loff) eeprom_data_t eeprom_data; unsigned char data[18 ] = {0 }; int len = 0 ; int i = 0 ; int ret = -1 ; printk("%s\n" , __func__); memset (&eeprom_data, 0 , sizeof (eeprom_data_t )); ret = copy_from_user(&eeprom_data, buf, count); if (ret < 0 ) { printk("%s, copy_from_user failed, ret: %d\n" , __func__, ret); return -1 ; } memcpy (&data[2 ], eeprom_data.data, eeprom_data.len); data[0 ] = (char )((eeprom_data.reg & 0x0000ff00 ) >> 8 ); data[1 ] = (char )(eeprom_data.reg & 0x000000ff ); len = eeprom_data.len + 2 ; for (i = 0 ; i < len; i++) { printk("%s, data[%d]: 0x%2x\n" , __func__, i, data[i]); } #if 1 ret = i2c_master_send(eeprom_driver.client, data, len); #else #endif return 0 ; }
2)接收 1 2 i2c_master_send(client, reg, reg_len); i2c_master_recv(client, data, data_len);
I2C接收不同于发送,需要两步来完成,先使用i2c_master_send()函数向I2C从设备发送要读取的寄存器地址;再使用i2c_master_recv()函数,从I2C从设备指定寄存器地址读取数据;
reg:要读取的从设备寄存器地址数组;如果地址是8bits,reg_len为1;如果地址是16bits,reg_len为2;
data:要读取的数据信息存放的指针地址;data_len为要读取的寄存器个数;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 static ssize_t eeprom_driver_read (struct file *filp, char __user *buf, size_t count, loff_t *loff) eeprom_data_t eeprom_data; unsigned char reg[2 ] = {0 }; int i = 0 ; int ret = -1 ; printk("%s\n" , __func__); memset (&eeprom_data, 0 , sizeof (eeprom_data_t )); ret = copy_from_user(&eeprom_data, buf, count); if (ret < 0 ) { printk("%s, copy_from_user failed, ret: %d\n" , __func__, ret); return -1 ; } reg[0 ] = (char )((eeprom_data.reg & 0x0000ff00 ) >> 8 ); reg[1 ] = (char )(eeprom_data.reg & 0x000000ff ); #if 1 ret = i2c_master_send(eeprom_driver.client, reg, 2 ); ret = i2c_master_recv(eeprom_driver.client, eeprom_data.data, eeprom_data.len); #else #endif for (i = 0 ; i < eeprom_data.len; i++) { printk("%s, i2c_master_recv, reg[%d]: 0x%x, data: 0x%2x\n" , __func__, i, eeprom_data.reg + i, eeprom_data.data[i]); } ret = copy_to_user(buf, &eeprom_data, count); if (ret < 0 ) { printk("%s, copy_to_user failed, ret: %d\n" , __func__, ret); return -1 ; } return 0 ; }
5.3.2 直接封装 直接通过封装i2c_msg消息,通过i2c_transfer()函数实现I2C信息的发送和接收;
1)发送 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 int i2c_send_bytes (const struct i2c_client *client, unsigned short reg, const char *buf, int count) unsigned char *data = NULL ; struct i2c_msg msg ; int len = 0 ; int ret = -1 ; data = kmalloc(count + 2 , GFP_KERNEL); if (!data) { printk("%s, kmalloc failed!\n" , __func__); return -1 ; } data[0 ] = (char )((reg & 0x0000ff00 ) >> 8 ); data[1 ] = (char )(reg & 0x000000ff ); memcpy (&data[2 ], buf, count); len = count + 2 ; memset (&msg, 0 , sizeof (msg)); msg.addr = client->addr; msg.flags = 0 ; msg.len = count; msg.buf = data; ret = i2c_transfer(client->adapter, &msg, 1 ); if (data) { kfree(data); data = NULL ; } return ret; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 static ssize_t eeprom_driver_write (struct file *filp, const char __user *buf, size_t count, loff_t *loff) eeprom_data_t eeprom_data; int i = 0 ; int ret = -1 ; memset (&eeprom_data, 0 , sizeof (eeprom_data_t )); ret = copy_from_user(&eeprom_data, buf, count); if (ret < 0 ) { printk("%s, copy_from_user failed, ret: %d\n" , __func__, ret); return -1 ; } ret = i2c_send_bytes(eeprom_driver.client, eeprom_data.reg, eeprom_data.data, eeprom_data.len); return 0 ; }
2)接收 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 int i2c_recv_bytes (const struct i2c_client *client, unsigned short reg, unsigned char *buf, int count) struct i2c_msg msg [2] = {0 }; unsigned char txbuf[2 ] = { 0 }; int ret = -1 ; txbuf[0 ] = (char )((reg & 0x0000ff00 ) >> 8 ); txbuf[1 ] = (char )(reg & 0x000000ff ); memset (&msg, 0 , sizeof (msg)); msg[0 ].addr = client->addr; msg[0 ].flags = 0 ; msg[0 ].len = 2 ; msg[0 ].buf = txbuf; msg[1 ].addr = client->addr; msg[1 ].flags = I2C_M_RD; msg[1 ].len = count; msg[1 ].buf = buf; ret = i2c_transfer(client->adapter, msg, 2 ); return ret; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 static ssize_t eeprom_driver_read (struct file *filp, char __user *buf, size_t count, loff_t *loff) eeprom_data_t eeprom_data; int i = 0 ; int ret = -1 ; memset (&eeprom_data, 0 , sizeof (eeprom_data_t )); ret = copy_from_user(&eeprom_data, buf, count); if (ret < 0 ) { printk("%s, copy_from_user failed, ret: %d\n" , __func__, ret); return -1 ; } ret = i2c_recv_bytes(eeprom_driver.client, eeprom_data.reg, eeprom_data.data, eeprom_data.len); ret = copy_to_user(buf, &eeprom_data, count); if (ret < 0 ) { printk("%s, copy_to_user failed, ret: %d\n" , __func__, ret); return -1 ; } return 0 ; }
6. 驱动和设备匹配 设备和驱动的关系
对于一个驱动程序,有两个必不可少的元素,即:设备和驱动,驱动是通过设备名和驱动名建立联系;在i2c_adapter注册时会遍历i2c_board_info结构,会完成驱动和设备的匹配;
一个驱动程序,可以有多个名字,即一个驱动程序可以支持多个设备,该机制通过由i2c_device_id结构体组成的数组实现;该数组是在驱动中建立;I2C架构会扫描该结构体数组,逐一与设备进行匹配,匹配成功就会调用相应的probe函数;
进入驱动中的probe函数,要先进入总线的probe函数,而前提是设备与驱动的match匹配成功;
bus_add_driver
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 // drivers/base/bus.c int bus_add_driver(struct device_driver *drv) { struct bus_type *bus; struct driver_private *priv; int error = 0; bus = bus_get(drv->bus); priv = kzalloc(sizeof(*priv), GFP_KERNEL); klist_init(&priv->klist_devices, NULL, NULL); priv->driver = drv; drv->p = priv; priv->kobj.kset = bus->p->drivers_kset; error = kobject_init_and_add(&priv->kobj, &driver_ktype, NULL, "%s", drv->name); klist_add_tail(&priv->knode_bus, &bus->p->klist_drivers); if (drv->bus->p->drivers_autoprobe) { if (driver_allows_async_probing(drv)) { async_schedule(driver_attach_async, drv); } else { error = driver_attach(drv); } } module_add_driver(drv->owner, drv); error = driver_create_file(drv, &driver_attr_uevent); error = driver_add_groups(drv, bus->drv_groups); if (!drv->suppress_bind_attrs) { error = add_bind_files(drv); } ...... }
1 2 3 4 5 6 // drivers/base/dd.c int driver_attach(struct device_driver *drv) { return bus_for_each_dev(drv->bus, NULL, drv, __driver_attach); } EXPORT_SYMBOL_GPL(driver_attach);
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 // drivers/base/bus.c int bus_for_each_dev(struct bus_type *bus, struct device *start, void *data, int (*fn)(struct device *, void *)) { struct klist_iter i; struct device *dev; int error = 0; if (!bus || !bus->p) return -EINVAL; klist_iter_init_node(&bus->p->klist_devices, &i, (start ? &start->p->knode_bus : NULL)); while ((dev = next_device(&i)) && !error) error = fn(dev, data); klist_iter_exit(&i); return error; } EXPORT_SYMBOL_GPL(bus_for_each_dev);
1 2 3 4 5 6 7 8 9 10 11 12 // drivers/base/dd.c static int __driver_attach(struct device *dev, void *data) { struct device_driver *drv = data; int ret; ret = driver_match_device(drv, dev); ...... if (!dev->driver) driver_probe_device(drv, dev); ...... }
1 2 3 4 5 6 // drivers/base/base.h static inline int driver_match_device(struct device_driver *drv, struct device *dev) { return drv->bus->match ? drv->bus->match(dev, drv) : 1; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 // drivers/base/dd.c int driver_probe_device(struct device_driver *drv, struct device *dev) { int ret = 0; if (!device_is_registered(dev)) return -ENODEV; pr_debug("bus: '%s': %s: matched device %s with driver %s\n", drv->bus->name, __func__, dev_name(dev), drv->name); if (dev->parent) pm_runtime_get_sync(dev->parent); pm_runtime_barrier(dev); ret = really_probe(dev, drv); pm_request_idle(dev); if (dev->parent) pm_runtime_put(dev->parent); return ret; }
1 2 3 4 5 6 7 8 9 10 11 // drivers/base/dd.c static int really_probe(struct device *dev, struct device_driver *drv) { ...... if (dev->bus->probe) { ret = dev->bus->probe(dev); } else if (drv->probe) { ret = drv->probe(dev); } ...... }
graph TB
bus_add_driver(bus_add_driver)-->
driver_attach(driver_attach)--bus_for_each_dev-->
__driver_attach(__driver_attach)-->
driver_match_device(driver_match_device)-->
bus_match(drv->bus->match)
__driver_attach-->driver_probe_device(driver_probe_device)-->
really_probe(really_probe)-->
bus_probe(dev->bus->probe)
1 2 3 4 5 6 7 8 9 // drivers/i2c/i2c-core.c struct bus_type i2c_bus_type = { .name = "i2c", .match = i2c_device_match, .probe = i2c_device_probe, .remove = i2c_device_remove, .shutdown = i2c_device_shutdown, }; EXPORT_SYMBOL_GPL(i2c_bus_type);
6.1 match 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 // drivers/i2c/i2c-core.c static int i2c_device_match(struct device *dev, struct device_driver *drv) { struct i2c_client *client = i2c_verify_client(dev); struct i2c_driver *driver; if (!client) return 0; /* Attempt an OF style match */ if (of_driver_match_device(dev, drv)) return 1; /* Then ACPI style match */ if (acpi_driver_match_device(dev, drv)) return 1; driver = to_i2c_driver(drv); /* match on an id table if there is one */ if (driver->id_table) return i2c_match_id(driver->id_table, client) != NULL; return 0; }
graph LR
i2c_device_match(i2c_device_match)
i2c_device_match-->of_driver_match_device(of_driver_match_device)
i2c_device_match-->acpi_driver_match_device(acpi_driver_match_device)
i2c_device_match--id_table-->i2c_match_id(i2c_match_id)
从i2c_device_match()函数的定义可以得出,i2c的match函数,优先选择设备树匹配(of_driver_match_device),如果设备树匹配成功,函数就返回;否则,会进行下一个。。。。。。,最后,如果定义了id_table,就会通过i2c_match_id()函数进行id_table匹配;如果三者全都匹配不成功,才算是匹配失败;
从i2c_device_match函数来看,配置了设备树,就不需要id_table的定义了;但是实际上还是需要id_table的定义的,因为在后边的probe函数中需要判断id_table是否定义,如果定义了才能执行driver->probe函数;
设备树的匹配过程如下:
graph TB
of_driver_match_device(of_driver_match_device)-->
of_match_device(of_match_device)-->
of_match_node(of_match_node)-->
__of_match_node(__of_match_node)-->
__of_device_is_compatible(__of_device_is_compatible)
__of_device_is_compatible--compatible-->of_compat_cmp(of_compat_cmp)
__of_device_is_compatible--type-->of_compat_cmp
__of_device_is_compatible--name-->of_compat_cmp
of_compat_cmp-->
strcasecmp(strcasecmp)
__of_match_node()函数,把device_driver的of_match_table(struct of_device_id)和device里的of_node(struct device_node)进行匹配;
匹配方式是,在__of_device_is_compatible()函数里,分别调用of_compat_cmp()函数对两者的compatible、type、name字符串进行对比,compatible、type、name字符串要同时相同;一般情况下,name、type为空,只比较compatible字符串;比较compatible字符串时是比较整个字符串;这里的比较不是单纯的比较,是采用的加分制;
6.2 probe 1 2 3 4 5 6 7 8 9 10 11 12 13 14 // drivers/i2c/i2c-core.c static int i2c_device_probe(struct device *dev) { struct i2c_client *client = i2c_verify_client(dev); struct i2c_driver *driver; int status; ...... driver = to_i2c_driver(dev->driver); if (!driver->probe || !driver->id_table) return -ENODEV; ...... status = driver->probe(client, i2c_match_id(driver->id_table, client)); ...... }
i2c_device_probe()函数中,如果配置了设备树,i2c总线在match函数中,就不需要id_table的定义了;但是在probe函数中,还是需要id_table的定义的,因为在probe函数中需要判断id_table是否定义,如果定义了才能执行driver->probe函数;
6.3 I2C注册匹配过程
7. 实例 以添加eeprom驱动为例讲解I2C驱动在eeprom芯片中的使用;
7.1 添加设备 1)添加设备树 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 // arch/arm/boot/dts/vexpress-v2m.dtsi v2m_i2c_dvi: i2c@16000 { compatible = "arm,versatile-i2c"; reg = <0x16000 0x1000>; #address-cells = <1>; #size-cells = <0>; dvi-transmitter@39 { compatible = "sil,sii9022-tpi", "sil,sii9022"; reg = <0x39>; }; dvi-transmitter@60 { compatible = "sil,sii9022-cpi", "sil,sii9022"; reg = <0x60>; }; eeprom@51 { compatible = "mcy,mcy_eeprom"; reg = <0x51>; }; };
2)i2c_new_device 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 #include <linux/module.h> #include <linux/i2c.h> static struct i2c_client *client ;static struct i2c_board_info eeprom_info = { I2C_BOARD_INFO("eeprom_device" , 0x51 ), }; static int eeprom_device_init (void ) struct i2c_adapter *adap = NULL ; adap = i2c_get_adapter(2 ); if (!adap) { printk("%s, i2c_get_adapter failed!\n" , __func__); return -1 ; } client = i2c_new_device(adap, &eeprom_info); if (!client) { printk("%s, i2c_new_device failed!\n" , __func__); return -2 ; } i2c_put_adapter(adap); return 0 ; } static void eeprom_device_exit (void ) i2c_unregister_device(client); } module_init(eeprom_device_init); module_exit(eeprom_device_exit);
7.2 添加驱动 实例代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 #include <linux/module.h> #include <linux/cdev.h> #include <linux/fs.h> #include <linux/slab.h> #include <linux/i2c.h> #include <asm-generic/uaccess.h> typedef struct eeprom_data_s { int reg; int len; unsigned char data[16 ]; } eeprom_data_t ; typedef struct eeprom_driver_s { dev_t devnum; struct cdev *cdev ; struct class *class ; struct device *dev ; struct i2c_client *client ; } eeprom_driver_t ; eeprom_data_t eeprom_data;eeprom_driver_t eeprom_driver;static int eeprom_driver_open (struct inode *inode, struct file *filp) return 0 ; } static int eeprom_driver_release (struct inode *inode, struct file *filp) return 0 ; } static ssize_t eeprom_driver_read (struct file *filp, char __user *buf, size_t count, loff_t *loff) eeprom_data_t eeprom_data; unsigned char reg[2 ] = {0 }; int i = 0 ; int ret = -1 ; memset (&eeprom_data, 0 , sizeof (eeprom_data_t )); ret = copy_from_user(&eeprom_data, buf, count); if (ret < 0 ) { printk("%s, copy_from_user failed, ret: %d\n" , __func__, ret); return -1 ; } reg[0 ] = (char )((eeprom_data.reg & 0x0000ff00 ) >> 8 ); reg[1 ] = (char )(eeprom_data.reg & 0x000000ff ); ret = i2c_master_send(eeprom_driver.client, reg, 2 ); ret = i2c_master_recv(eeprom_driver.client, eeprom_data.data, eeprom_data.len); for (i = 0 ; i < eeprom_data.len; i++) { printk("%s, i2c_master_recv, reg[%d]: 0x%x, data: 0x%2x\n" , __func__, i, eeprom_data.reg + i, eeprom_data.data[i]); } ret = copy_to_user(buf, &eeprom_data, count); if (ret < 0 ) { printk("%s, copy_to_user failed, ret: %d\n" , __func__, ret); return -1 ; } return 0 ; } static ssize_t eeprom_driver_write (struct file *filp, const char __user *buf, size_t count, loff_t *loff) eeprom_data_t eeprom_data; unsigned char data[18 ] = {0 }; int len = 0 ; int i = 0 ; int ret = -1 ; memset (&eeprom_data, 0 , sizeof (eeprom_data_t )); ret = copy_from_user(&eeprom_data, buf, count); if (ret < 0 ) { printk("%s, copy_from_user failed, ret: %d\n" , __func__, ret); return -1 ; } memcpy (&data[2 ], eeprom_data.data, eeprom_data.len); data[0 ] = (char )((eeprom_data.reg & 0x0000ff00 ) >> 8 ); data[1 ] = (char )(eeprom_data.reg & 0x000000ff ); len = eeprom_data.len + 2 ; for (i = 0 ; i < len; i++) { printk("%s, data[%d]: 0x%2x\n" , __func__, i, data[i]); } ret = i2c_master_send(eeprom_driver.client, data, len); return 0 ; } struct file_operations eeprom_driver_fops = { .open = eeprom_driver_open, .release = eeprom_driver_release, .read = eeprom_driver_read, .write = eeprom_driver_write, }; int eeprom_driver_probe (struct i2c_client *client, const struct i2c_device_id *id) int major = 0 ; int ret = -1 ; eeprom_driver.client = client; ret = alloc_chrdev_region(&eeprom_driver.devnum, 0 , 1 , "eeprom_driver_chrdev" ); if (ret < 0 ) { printk("%s, alloc_chrdev_region failed!\n" , __func__); goto chrdev_err; } major = MAJOR(eeprom_driver.devnum); printk("%s, alloc_chrdev_region, devnum: 0x%x, major: %d\n" , __func__, eeprom_driver.devnum, major); eeprom_driver.cdev = cdev_alloc(); if (!eeprom_driver.cdev) { printk("%s, cdev_alloc failed!\n" , __func__); goto cdev_alloc_err; } cdev_init(eeprom_driver.cdev, &eeprom_driver_fops); ret = cdev_add(eeprom_driver.cdev, eeprom_driver.devnum, 1 ); if (ret < 0 ) { printk("%s, cdev_add failed!\n" , __func__); goto cdev_add_err; } eeprom_driver.class = class_create (THIS_MODULE , "eeprom_driver_class "); if (IS_ERR(eeprom_driver.class)) { printk("%s, class_create failed!\n" , __func__); ret = PTR_ERR(eeprom_driver.class); goto class_create_err; } eeprom_driver.dev = device_create(eeprom_driver.class, NULL , eeprom_driver.devnum, NULL , "eeprom_driver" ); if (IS_ERR(eeprom_driver.dev)) { printk("%s, device_create failed!\n" , __func__); ret = PTR_ERR(eeprom_driver.dev); goto device_create_err; } return 0 ; device_create_err: class_destroy(eeprom_driver.class); class_create_err: cdev_del(eeprom_driver.cdev); cdev_add_err: kfree(eeprom_driver.cdev); cdev_alloc_err: unregister_chrdev_region(eeprom_driver.devnum, 1 ); chrdev_err: return -EINVAL; } int eeprom_driver_remove (struct i2c_client *client) device_destroy(eeprom_driver.class, eeprom_driver.devnum); class_destroy(eeprom_driver.class); cdev_del(eeprom_driver.cdev); kfree(eeprom_driver.cdev); unregister_chrdev_region(eeprom_driver.devnum, 1 ); return 0 ; } struct i2c_device_id eeprom_driver_id [] = { {"mcy_eeprom" , 0 }, {}, }; struct of_device_id eeprom_driver_table [] = { { .compatible = "mcy,mcy_eeprom" , }, {}, }; struct i2c_driver eeprom_i2c_driver = { .driver = { .owner = THIS_MODULE, .name = "mcy_eeprom" , }, .probe = eeprom_driver_probe, .remove = eeprom_driver_remove, .id_table = eeprom_driver_id, }; static int eeprom_driver_init (void ) i2c_add_driver(&eeprom_i2c_driver); return 0 ; } static void eeprom_driver_exit (void ) i2c_del_driver(&eeprom_i2c_driver); } module_init(eeprom_driver_init); module_exit(eeprom_driver_exit);
7.3 应用程序 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 #include <stdio.h> #include <stdlib.h> #include <string.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <unistd.h> typedef struct eeprom_s { int reg; int len; unsigned char data[16 ]; } eeprom_data_t ; int eeprom_read (int reg, int len) eeprom_data_t eeprom_data; int fd = -1 ; int i = 0 ; int ret = -1 ; if (len > 16 ) { printf ("%s, len: %d over range!\n" , __func__, len); return -1 ; } memset (&eeprom_data, 0 , sizeof (eeprom_data_t )); eeprom_data.reg = reg; eeprom_data.len = len; ret = read (fd, &eeprom_data, sizeof (eeprom_data_t )); if (ret < 0 ) { printf ("%s, read failed, ret: %d\n" , __func__, ret); return -2 ; } for (i = 0 ; i < len; i++) { printf ("%s, reg[%d]: %d, data: 0x%2x\n" , __func__, i, reg + i, eeprom_data.data[i]); } return 0 ; } int eeprom_write (int reg, int len, unsigned char *data) eeprom_data_t eeprom_data; int fd = -1 ; int i = 0 ; int ret = -1 ; if (len > 16 ) { printf ("%s, len: %d over range!\n" , __func__, len); return -1 ; } memset (&eeprom_data, 0 , sizeof (eeprom_data_t )); eeprom_data.reg = reg; eeprom_data.len = len; ret = write (fd, &eeprom_data, sizeof (eeprom_data_t )); if (ret < 0 ) { printf ("%s, read failed, ret: %d\n" , __func__, ret); return -2 ; } for (i = 0 ; i < len; i++) { printf ("%s, reg[%d]: %d, data: 0x%2x\n" , __func__, i, reg + i, eeprom_data.data[i]); } return 0 ; } int main (int argc, char *argv[]) char buf[8 ] = {0 }; int count = 0 ; int reg = 0 ; int len = 0 ; int fd = -1 ; int ret = -1 ; fd = open ("/dev/eeprom_driver" , O_RDWR | O_NONBLOCK); if (fd < 0 ) { printf ("open failed, fd: %d\n" , fd); return -1 ; } ret = eeprom_write(reg, len, buf); if (ret < 0 ) { printf ("eeprom_write failed, ret: %d\n" , ret); close (fd); return -1 ; } ret = eeprom_read(reg, len); if (ret < 0 ) { printf ("eeprom_read failed, ret: %d\n" , ret); close (fd); return -1 ; } close (fd); return 0 ; }
7.4 Makefile 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 ifneq ($(KERNELRELEASE),) obj-m := mcy_eeprom_driver.o mcy_eeprom_device.o else # generate the path CURRENT_PATH:=$(shell pwd) # the absolute path LINUX_KERNEL_PATH := /home/xiami/tool/linux-4.9.115 CROSS_COMPILE := arm-linux-gnueabi- CC := $(CROSS_COMPILE)gcc # complie object all: make -C $(LINUX_KERNEL_PATH) M=$(CURRENT_PATH) modules clean: make -C $(LINUX_KERNEL_PATH) M=$(CURRENT_PATH) clean -rm main -rf app: $(CC) main.c -o main install: -chmod a+x *.ko -cp *.ko /home/xiami/qemu/nfs_root/mcy -rfp -cp main /home/xiami/qemu/nfs_root/mcy -rfp -chmod a+x /home/xiami/qemu/nfs_root/mcy/* main endif
8. 总结 I2C总线维护两个链表,一个是I2C驱动链表,一个是I2C设备链表,每当注册一个驱动(或设备),就会将其添加到I2C总线上相对应的I2C驱动链表(或I2C设备链表),然后遍历I2C总线的I2C设备(或I2C驱动)链表的所有设备(或驱动),通过I2C总线的匹配函数判断是否匹配,如果匹配,就调用驱动的probe函数,然后就可以在probe函数中注册字符设备,创建设备节点,实现设备操作集fops等,为应用调用提供接口;
参考资料
https://blog.csdn.net/shichaog/article/details/41169981
《Linux设备驱动开发详解》
《精通linux设备驱动程序开发》
回到目录